When one is going to Paris for a work trip, their mental images of the destination might vary, and the outcomes depend on the sort of work the individual does: someone involved with museums or history may be immersed in scenes much like the left photo; but someone engaged in a less posh line of work will end up with scenery resembling that on the right.


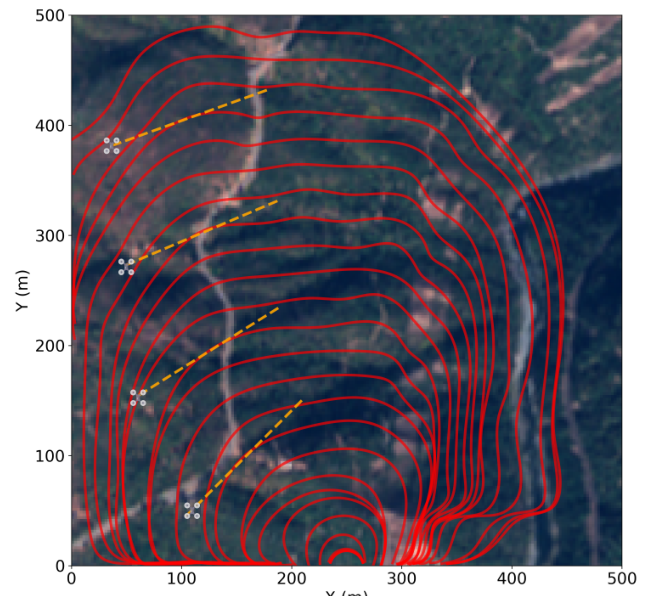
1. Drone swarm control for wild fire fighting
2. Loader crane control
The automation for a knuckle boom crane was created, which employs a stereo camera with onboard VPU compute and IMU together with an industrial controller (Beckhoff) that achieves material handling. Camera's compute unit runs YOLO NN, that registers the manipuland and the goal region for every task. The crane is controlled with Inverse Kinematics PID. Gains for the control and hydraulics' dead-band offsets were established experimentally.
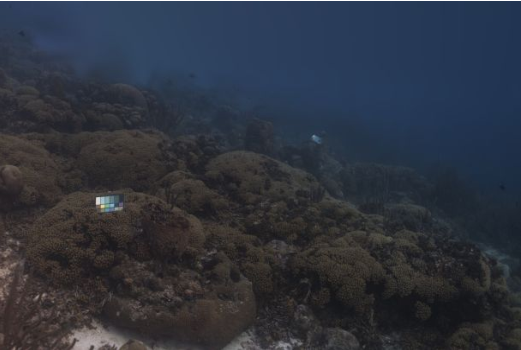
3. Underwater Gaussian Splats
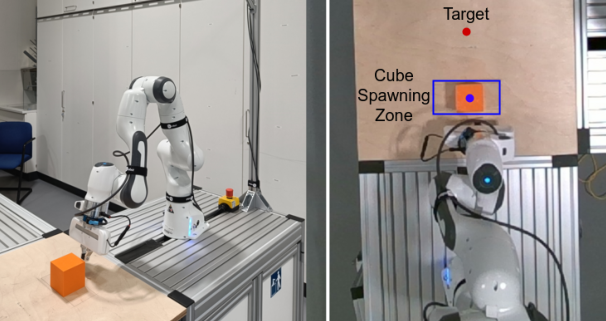
4. Safety Controller to augment Learned Robot Control Policies
5. Trajectory optimization for energy efficiency
Minimize the total power used by a redundant robot for a specified trajectory tracking goal. The goal gets formulated in terms of control points in robot's inner coordinates. The torques are computed via inverse dynamics and control points via inverse kinematics. The approach is reported to obtain 40%+ energy-efficiency gains on a Franka Panda manipulator.
Closing Remarks
Besides the above 5, the author's own contribution to ICCMA is presented on the blog's frontpage. Overall, this conference was stimulating and impressive, and much has been left out of this post.
References
- Rafal Krzysiak, Andrew Amavizca, Jesse Ramirez, Derek Hollenbeck, Sachin Giri, YangQuan Chen, "Modeling and Control of a Prescribed Fire with UAVs as Sensors and Actuators"
- Lars Østerholt, Are Gundersen, Jing Zhou, Daniel Hagen, "Real-Time Markerless Vision-Based Control of Knuckle Boom Cranes via Embedded AI"
- Anurag Dalal, Daniel Hagen, Kjell G. Robbersmyr, Kristian Muri Knausgård "ScatteringSplatting: Capturing Minute Details Using Deep Learning-Aided Gaussian Splatting"
- Konstantin Wrede, Sebastian Zarnack, Yibo Di, Julius Neumann, Martin Dehmei, Ron Martin, Dirk Mayer, Peter Schneider, "Towards a Workflow for Safe Simulation-to-Reality Transfer of Robot Control Policies"
- Giuliano Fabris, Lorenzo Scalera, Alessandro Gasparetto "Experimental validation of energy-efficient optimal trajectories for redundant robotic systems"
The images in 1,3,4 are courtesy of respective researchers.