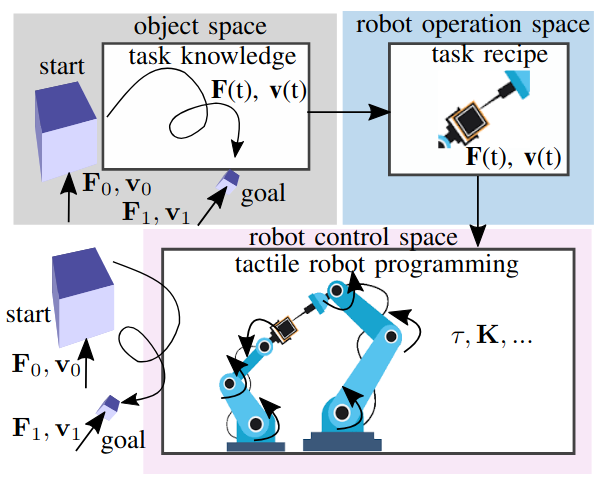
Tactile Robot Programming
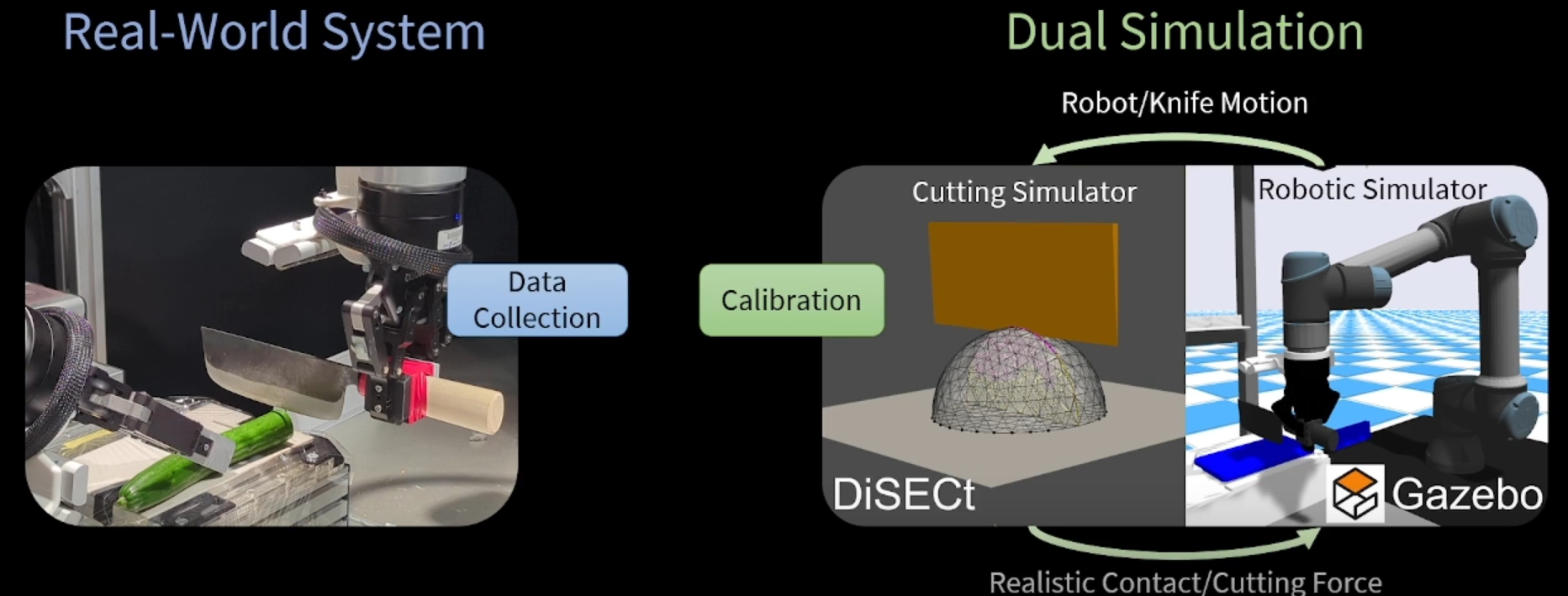
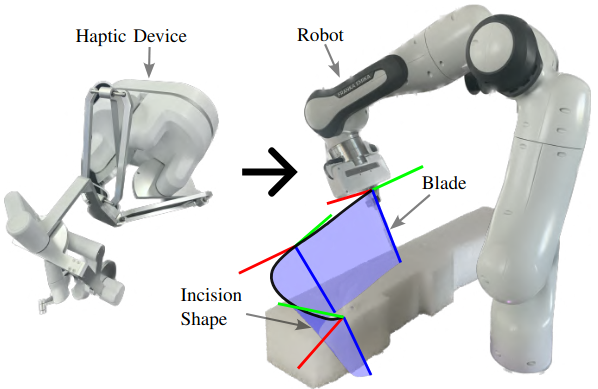
Robot Food Slicing
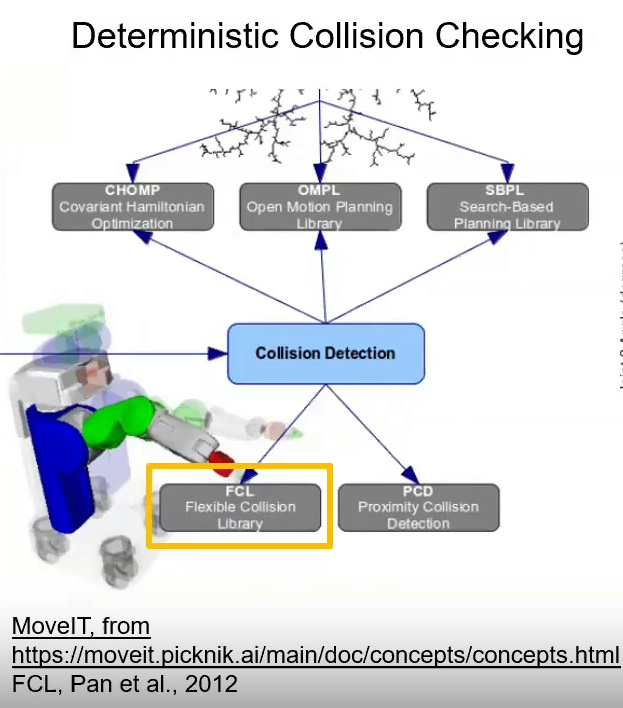
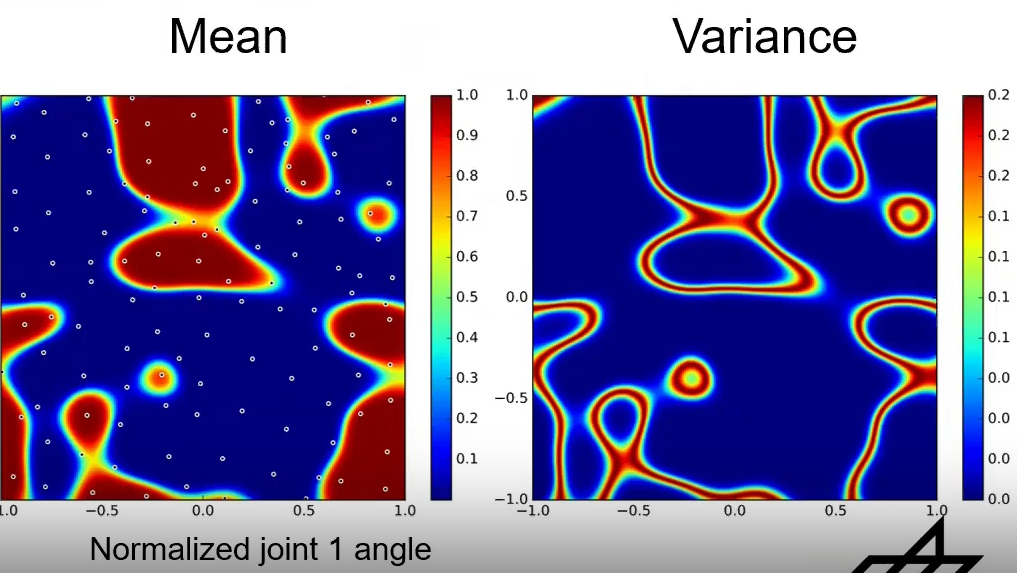
GP for Collision Checking
New state estimation metric based on SE2(3)
Authors [7] propose a better single-value scoring system for estimated trajectories of poses. The benefits of above are: 1) absence of the need to balance rotatitional loss against translational loss 2) it better describes the discrepancy in velocity 3) allows for trajectory compression via spectral parametrization. This is losely based on previous work with preintegrated IMUs.
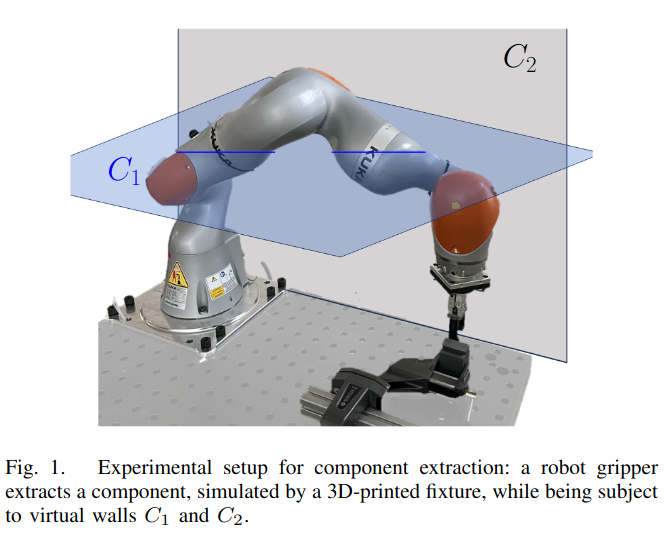
Enabling Passivity for Cartesian Workspace Restrictions
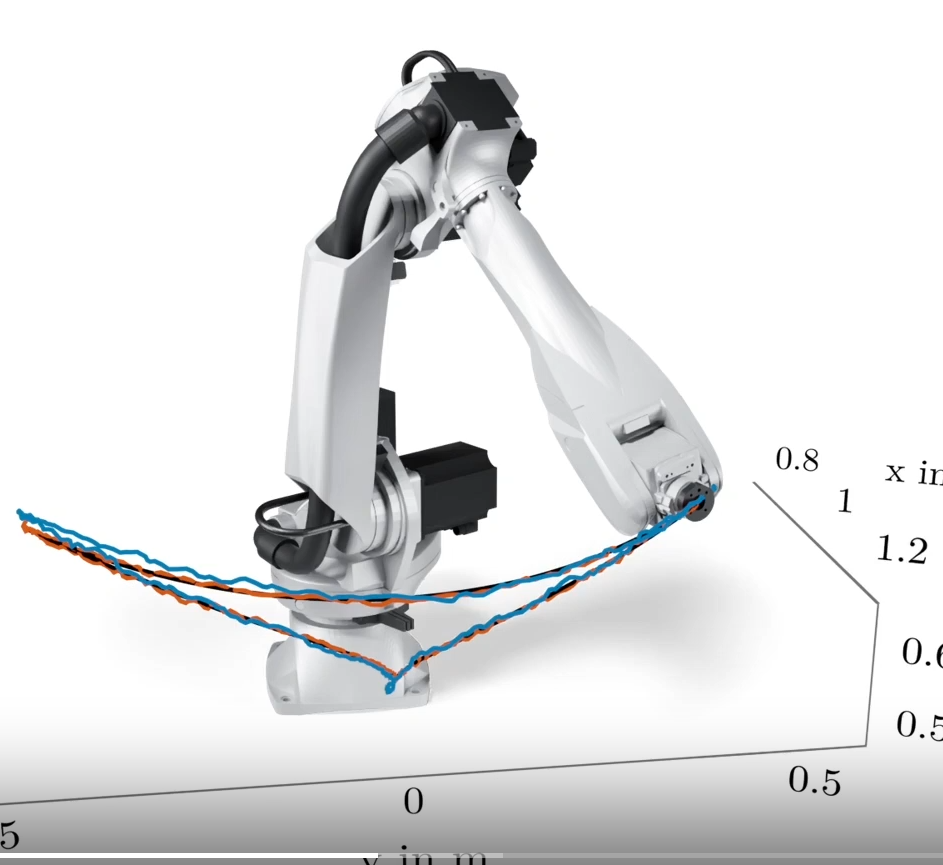
High-Precision Manipulator Position Tracking with ILC
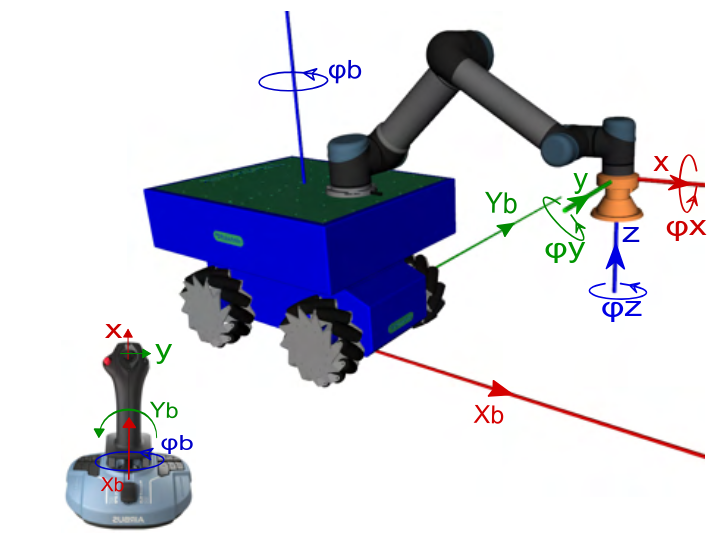
Surface tracking with mobile base manipulator
NMPC with feedback
A scrubbing robots that cleans adhesive contaminants
In [15] authors avoided using ADRC (Active Disturbance Rejection Control) by implementing passive distirbance rejection with a tendon-driven robot. The deformation of the rubbing sponge is accounted for in accordance with Hooke's Law.
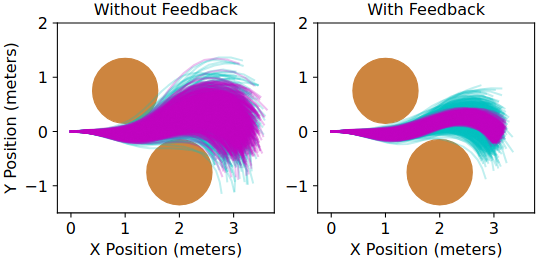
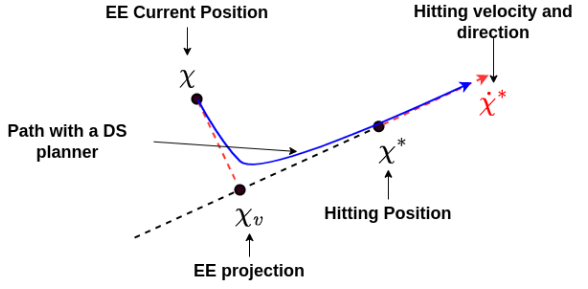
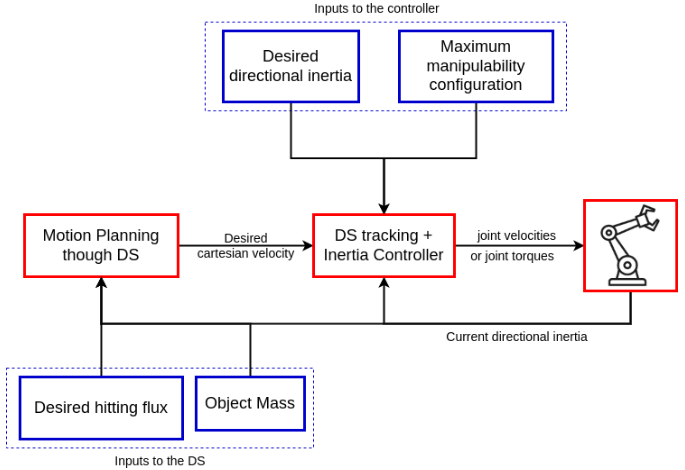
Inertia-based control for hitting known objects with manipulator
Reactive Trajectory Optimization for intercepting a thrown object mid-air
Authors [19] build upon the DPP (Differential Dynamic Programming) paradigm. "Probabilistic differential dynamic programming" is cited. Another good citation: "The Principle of Optimality in Dynamic Programming". Proposed method differs from DPP approaches in that the target state isn't a fixed value; it is probabilistic instead. Thus such a control sequence could be modeled probabilistically. The prior art on this includes "Gaussin Mixture Models for time series modeling, forecasting and interpretation" (2013), "Bayesian time series analysis" (2010). The key contribution of this article lies in solving for control corrections (formulated in Bayesian terms) to the initially computed DPP-trajectory. A result, unexpected by authors, is reported: longer optimization horizons lead to smaller control corrections. This is related to earlier work of [16], who also contributed to robotic projectile catching.
Filter-based SLAM with square-root update procedure
Authors [20] explore a novel SLAM architecture, not evaluated in earlier works. Prior to that, square-root update was demonstrated with Information-based Filter (e.g. iSAM2). Other covariance-based filters (e.g. MSCKF, MSCEqF) didn't use square-root update procedure. Publication is based on their previous result in SLAM enhancements, FEJ strategy. This result explored different existing marginalization schemes. Authors emhasize the importance of marginal covariance recovery in SLAM. OpenVINS is used to conduct a test in simulation.
Controller Tuning via Bayesian Optimization
Risk-averse & safe BO is explored in the article [22] in application to black-box tuning of a controller. Authors build upon their earlier work "Performance-based trajectory optimization for path following control using bayesian optimization". A monograph "Gaussian Processes for Machine Learning" is cited. Evaluated in simulation and with embodied 2d positioning system, tuning 4 variables: PID gains and the feedforward term.
Hybrid, Compliant Force-Impedance Control with fast motions
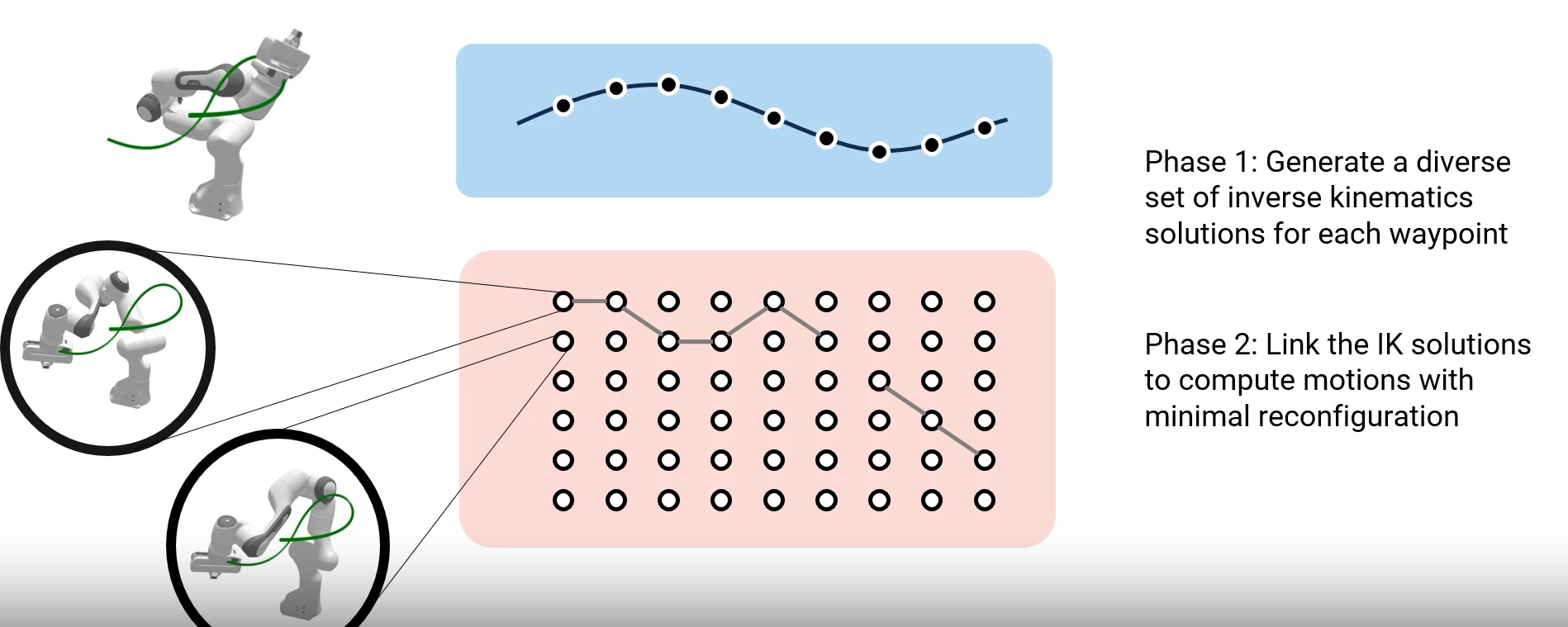
IKLink: EE motion planning of a serial maniputor
Learning from Demonstration with GMM and CBF
Stereo-NEC
NeRF-VINS
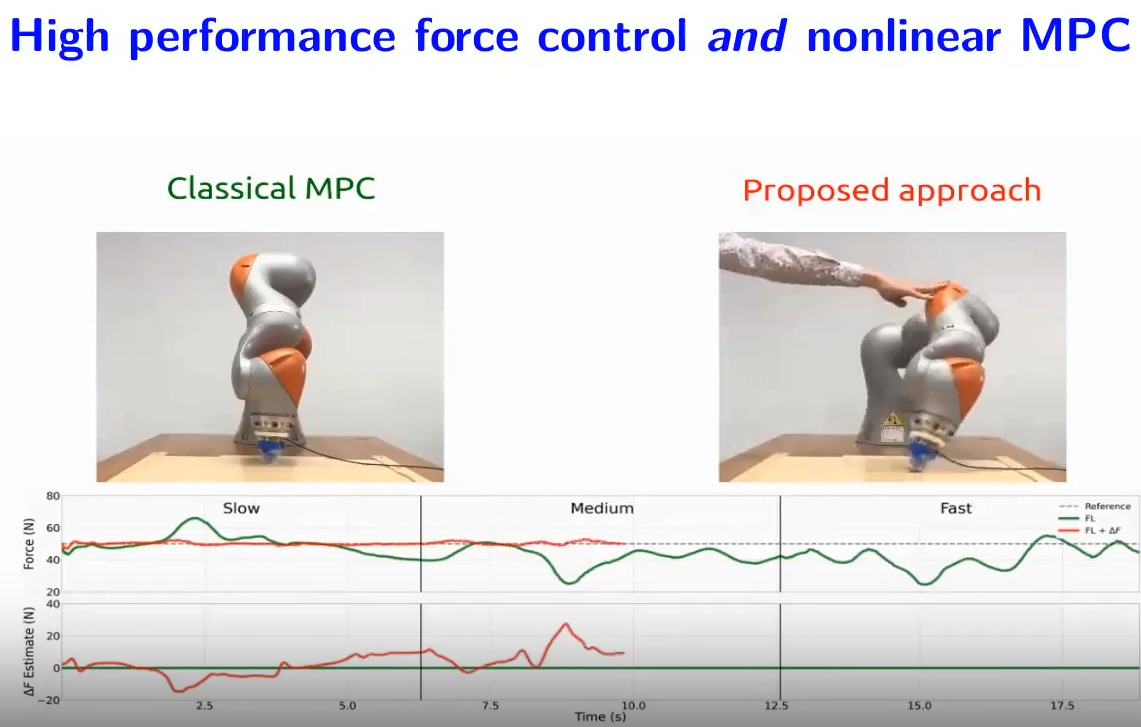
Force-Feedback MPC
Multi-Contact Feedback MPC
Listed under [33], cites Tedrake et al. on "Localizing external contact using proprioceptive sensors: The contact particle filter". The differentiating point of this work is the unplanned contact location identification.
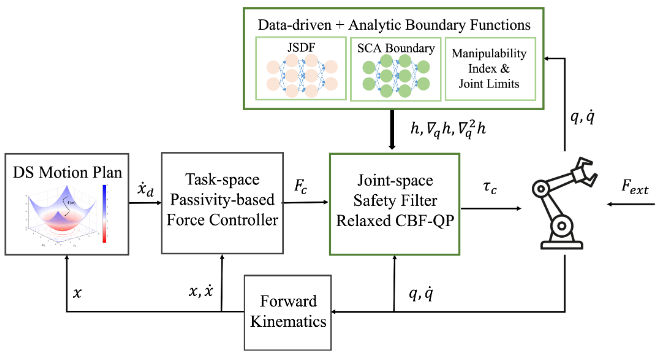
Constrained Passive Interaction Control
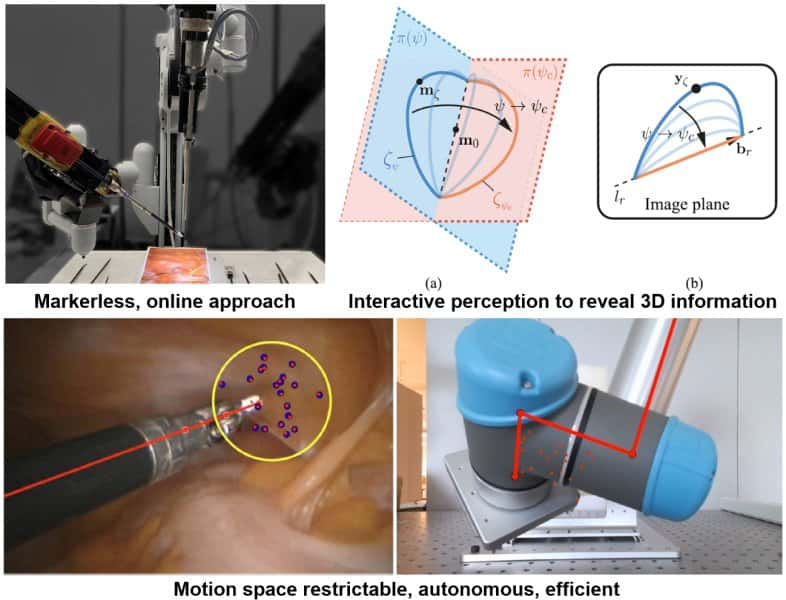
Hand-eye calibration for a serial manipulator
Miscellaneous
Learning to Play Foosball
Isaac Gym Sim + Real embodymentof a robotic foosball player [2]

Pegasus
Quadruped-Wheeled underactuated mechanism [4]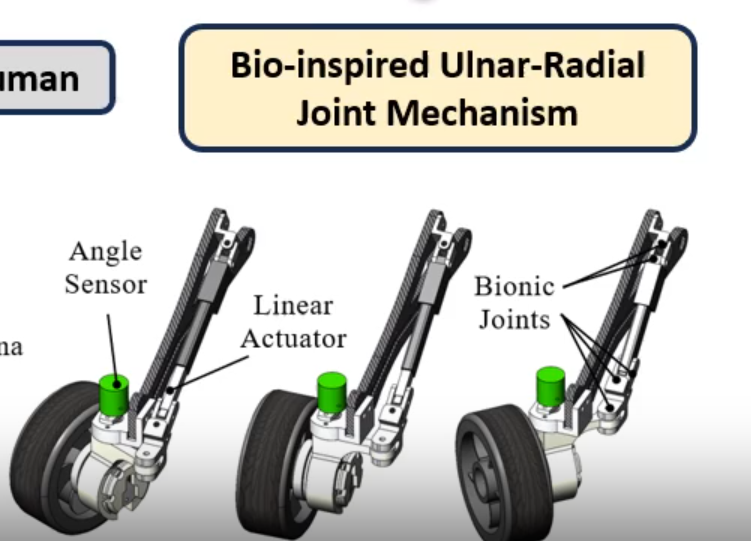
Burrowing of a snake-like robot
LSTM-based policy informed by robot's altitude [5]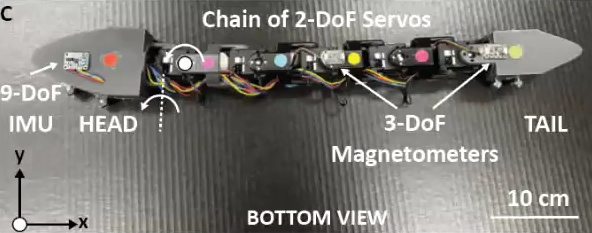
Online Policy RL driven by Uncertainty
Authors decouple epistemic and aleatoric uncertainity in the application of soft actor-critic network to a problem of bin picking [9].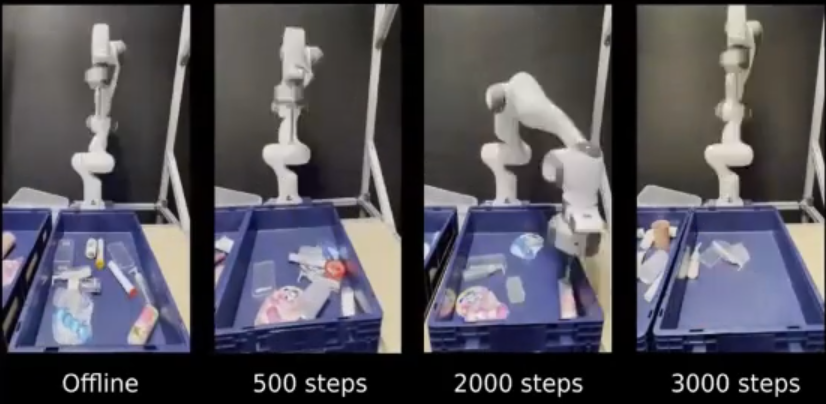
Award-winning (IROS23) Cloth Unfolding solution
with custom built IR sensor; Relies upon several movement primitives [10].
A 2d robotic shoulder
A novel design [14]., which is different from competition in having self-sensing capabilities and not having bulky encoders.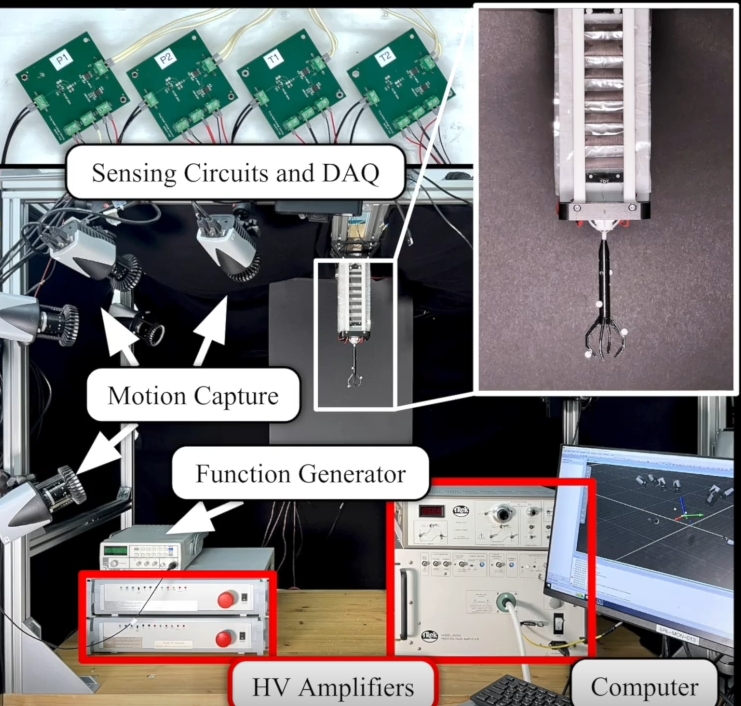
Ground To Satellite Image Registration
A NN-based matching [17] for the ground-plane projected camera images with satellite views.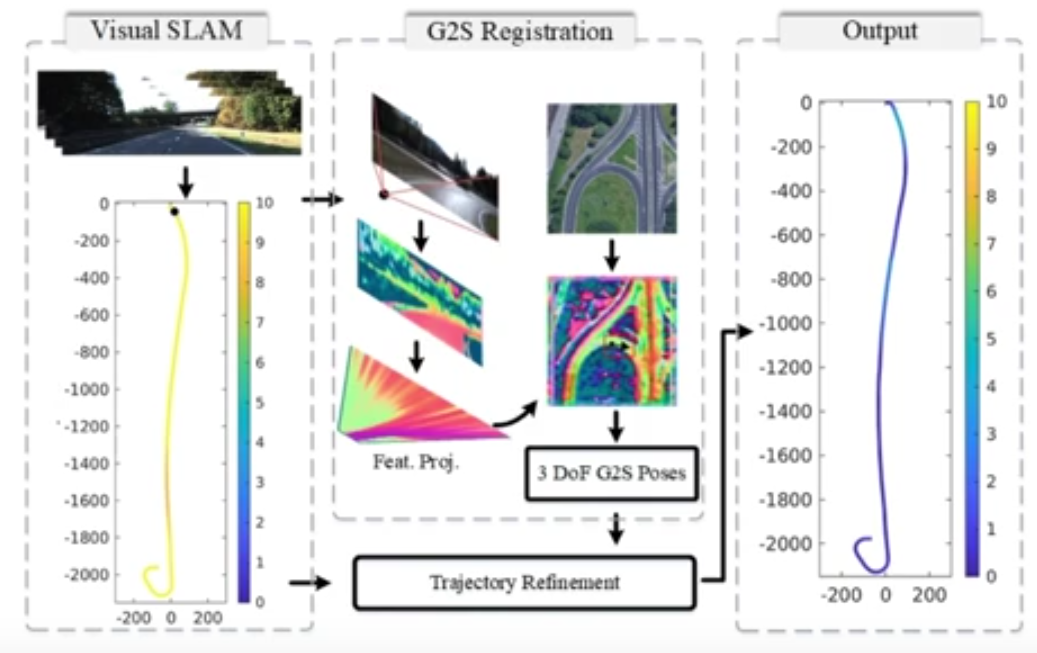
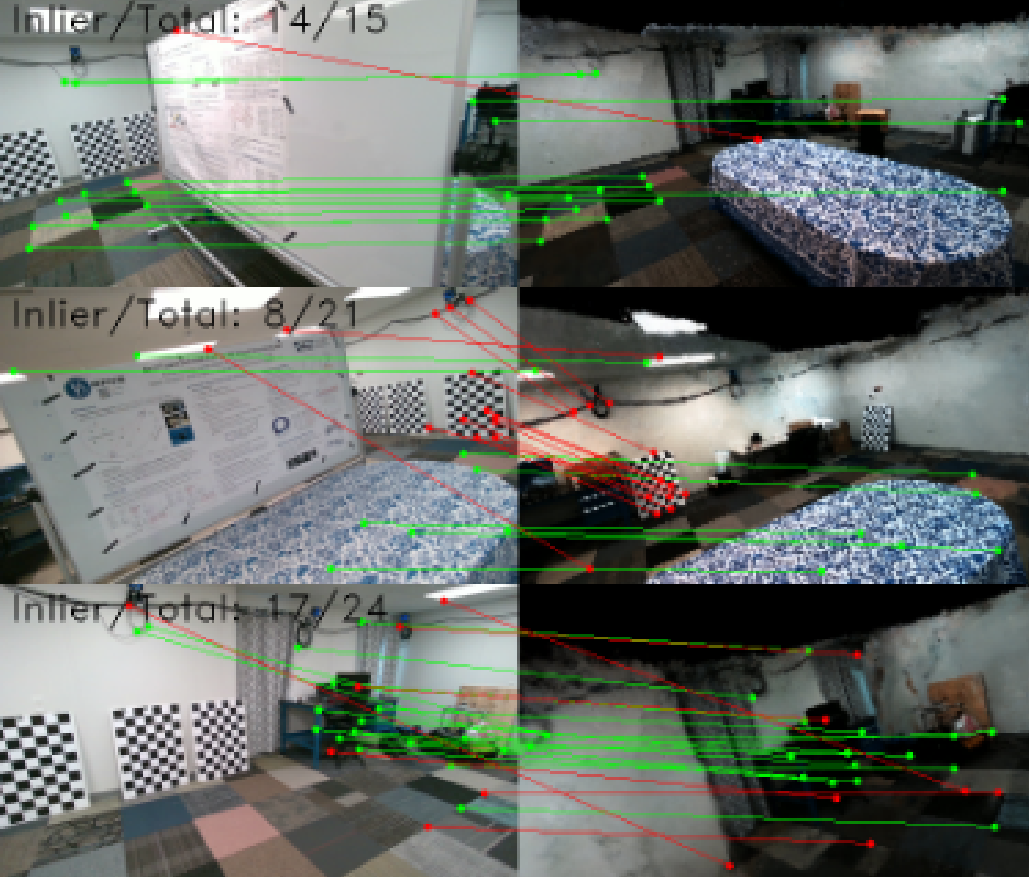
Smaller-footprint Visual Transformer for Relocalisation
Authors [18] conduct great experiments with recent competitors, and capture the current level of DNN-based relocalisation.Topological Primitives used in manipulator's path planning
Authors [21] explore pulling, untangling, and threading environments for their proposed planning program. "MoveIt" and MPPI (Model Predictive Path Integral [Control]) were used in experiments. The modeling was carried out in Mujoco, and in real-world setup.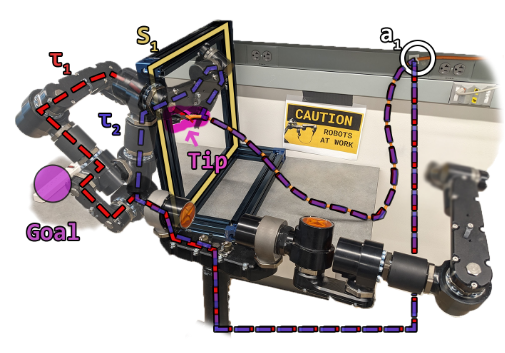
Vertical Vibratory Transport of Grasped Parts Using Impacts
An exciting design of a gripper capable of picking up various [26] objects with use of their inertia and gravity.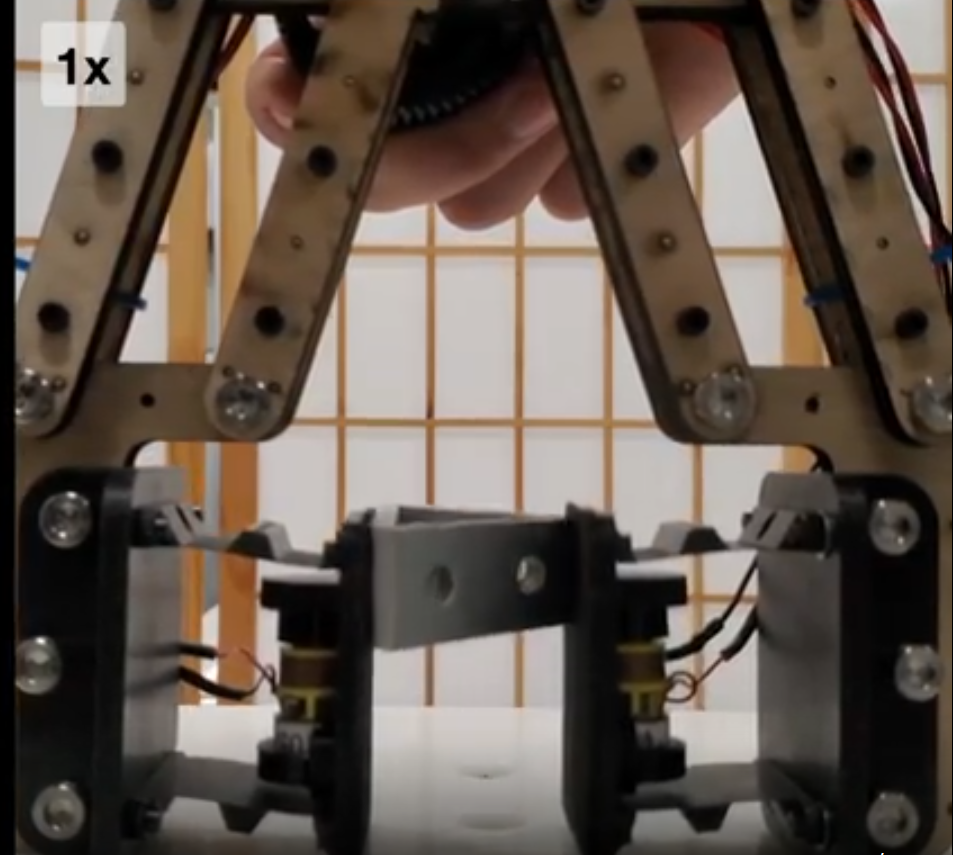
High performing SLAM solution with novel IMU-preintegration
Authors [27] include into IMU state current velocity, and use it in the pre-integration phase, allowing for better estimates during accelerating and decelerating motions.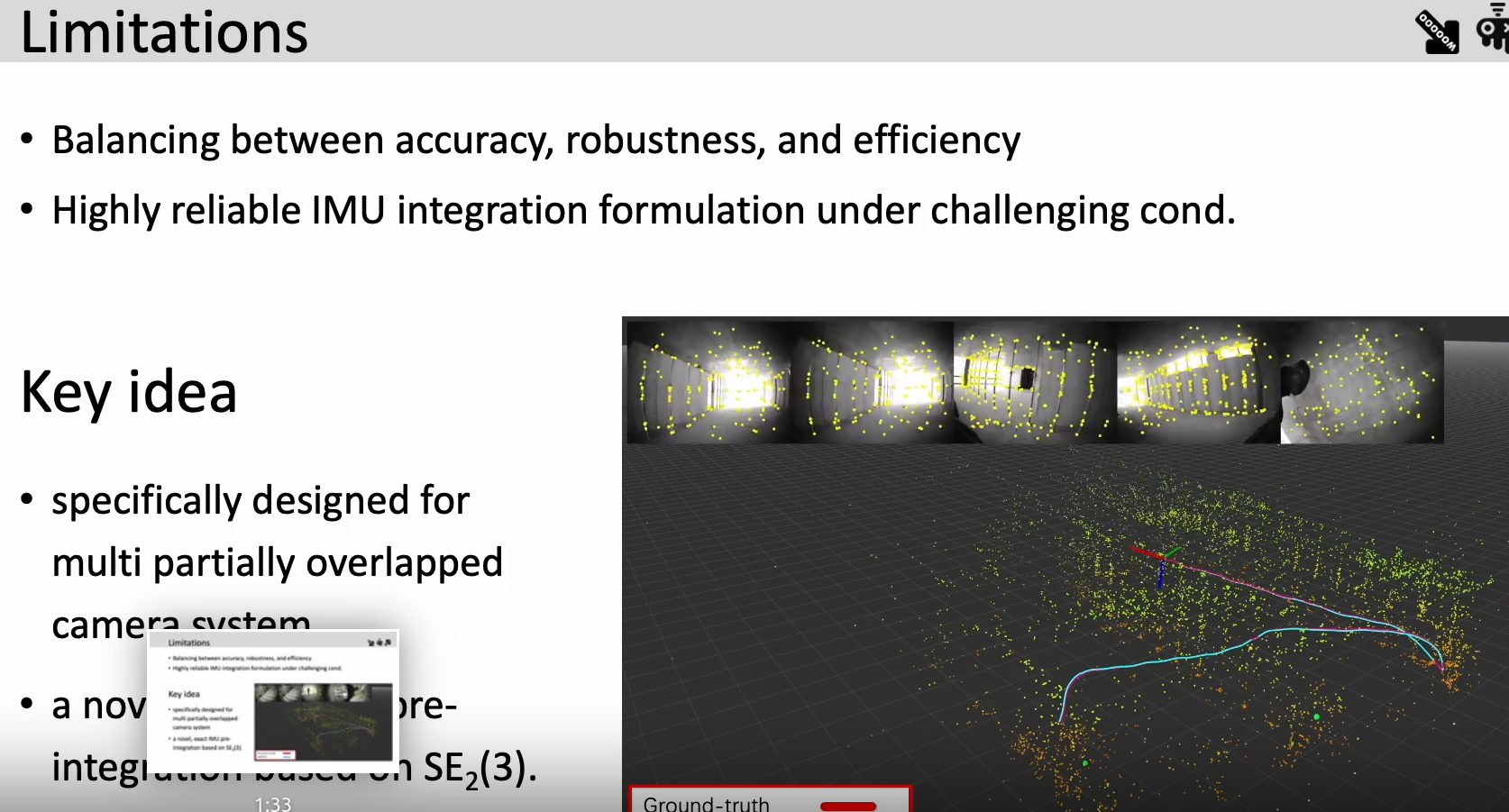
Jerk-constrained trajectory planning in torque coordinates
A linearization scheme [29] was proposed to linearize 3rd order contraints on industrial manipulator's torque commands, which results in a time-optimal smooth trajectory.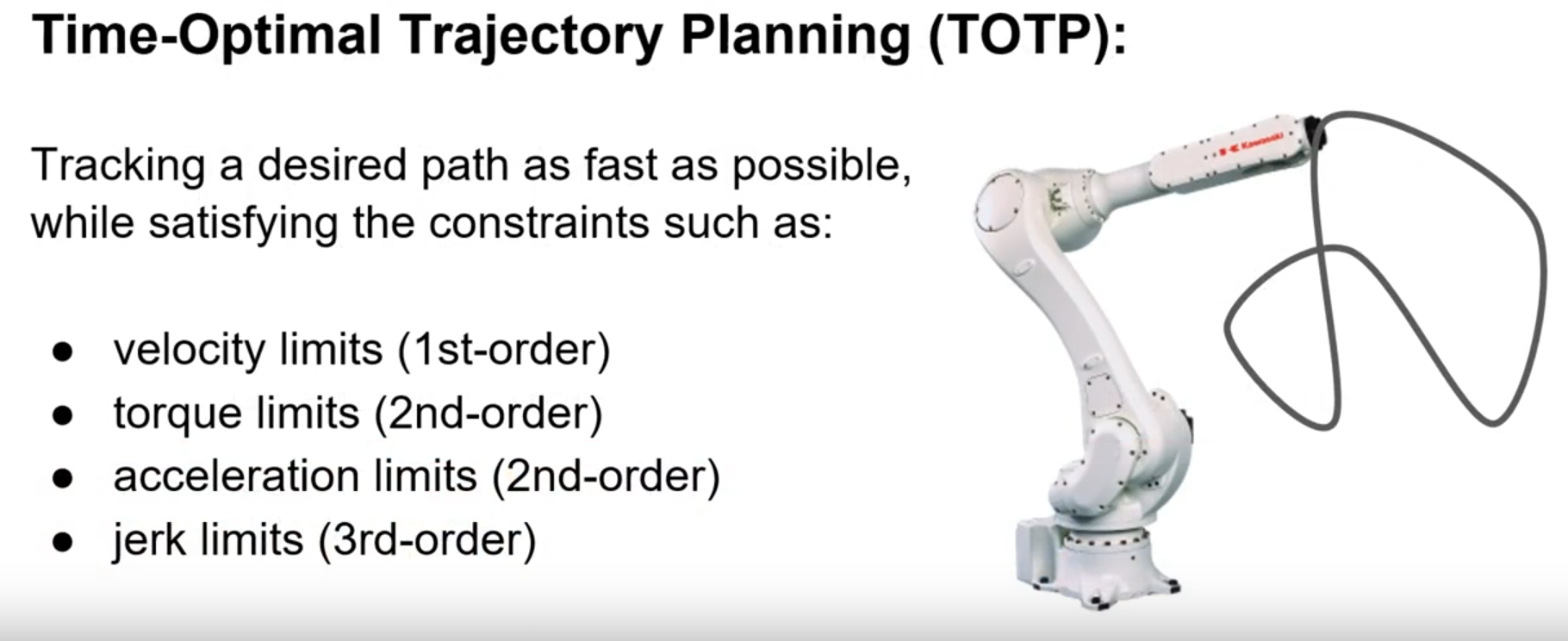
A ball-intercepting control for a serial manipulator
A fast-reacting (~1/3 sec.) control program is proposed that itercepts a ball thrown into manipulator with its end effector. A database of pre-optimized trajectores was used. The proposed methods dynamically solves for faster and safer trajectories, resulting in 10x lower joint torques.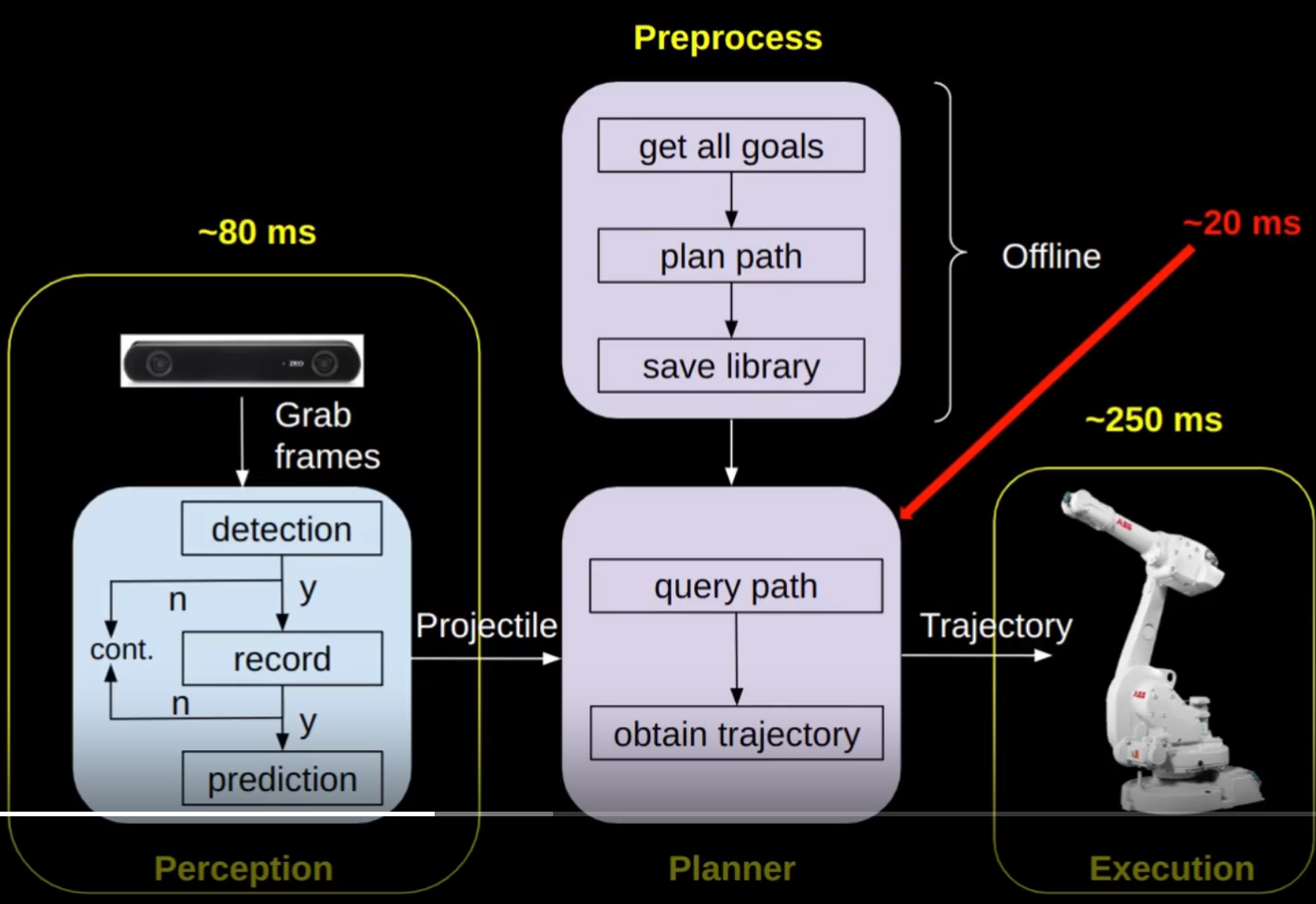
Wielding a screwdriver with a robotic hand
Authors [35] propose a hybrid force-control scheme that is capable of operating a common screwdriver.
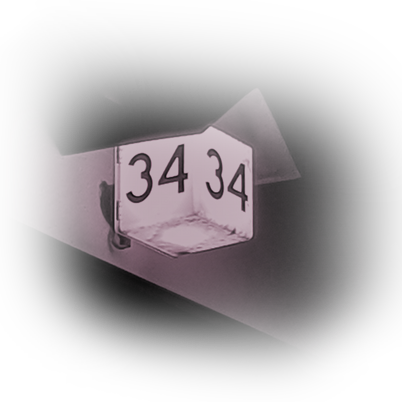
How does strain-gauge sensor actually look like?
What goes into it [37] is a high-quality solid aluminum body (its responses to the applied stress are well modelled), and the sensors which read off these stresses during the real operation.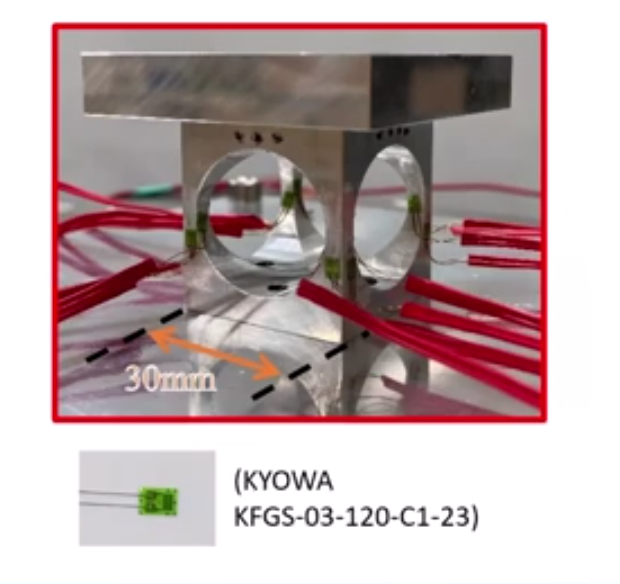
References
- Kubra Karacan, Robin Jeanne Kirschner, Hamid Sadeghian, Fan Wu, and Sami Haddadin, Tactile Robot Programming: Transferring Task Constraints into Constraint-Based Unified Force-Impedance Control
- Janosch Moos, Cedric Derstroff, Niklas Schröder, Debora Clever: Learning to Play Foosball: System and Baselines
- Cristian C. Beltran-Hernandez, Nicolas Erbetti, Masashi Hamaya: SliceIt! - a Dual Simulator Framework for Learning Robot Food Slicing
- Yuzhen Pan, Rezwan Al Islam Khan, Chenyun Zhang, Zhang Anzheng, Huiliang Shang: Pegasus: A Novel Bio-Inspired Quadruped Robot with Underactuated Wheeled-Legged Mechanism
- Sean Even, Holden Gordon, Hoeseok Yang, Yasemin Ozkan-Aydin: Machine Learning-Driven Burrowing with a Snake-Like Robot
- Javier Muñoz Mendi, Peter Lehner, Luis Moreno, Alin Albu-Schäffer, Maximo Roa: CollisionGP: Gaussian Process-Based Collision Checking for Robot Motion Planning
- Varun Agrawal, Frank Dellaert: A Group Theoretic Metric for Robot State Estimation Leveraging Chebyshev Interpolation
- Sebastian Hjorth, Johannes Lachner, Arash Ajoudani, Dimitrios Chrysostomou: Enabling Passivity for Cartesian Workspace Restrictions
- Yitian Shi, Philipp Schillinger, Miroslav Gabriel, Alexander Qualmann, Hanna Ziesche, Zohar Feldman, Ngo Anh Vien: Uncertainty-Driven Exploration Strategies for Online Grasp Learning
- Remko Proesmans, Andreas Verleysen, Francis wyffels: UnfoldIR: Tactile Robotic Unfolding of Cloth
- Michael Schwegel, Andreas Kugi: A Simple Computationally Efficient Path ILC for Industrial Robotic Manipulators
- Carlos Suarez Zapico, Y. R. Petillot, Mustafa Suphi Erden: Semi-Autonomous Surface-Tracking Tasks Using Omnidirectional Mobile Manipulators
- Adam Polevoy, Marin Kobilarov, Joseph Moore: Probably Approximately Correct Nonlinear Model Predictive Control (PAC-NMPC)
- Clemens Claudio Christoph, Amirhossein Kazemipour, Michel Ryan Vogt, Yu Zhang, Robert Kevin Katzschmann: Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
- Noah Harmatz, Alina Zahra, Amir Abdelmalak, Shivam Purohit, Trevor Shin, Aaron Mazzeo: Hybrid Force-Position Control of an Elastic Tendon-Driven Scrubbing Robot (TEDSR)
- Harshit Khurana and Aude Billard: Motion Planning and Inertia Based Control for Impact Aware Manipulation
- Yanhao Zhang, Yujiao Shi, Shan Wang, Ankit Vora, Akhil Perincherry, Yongbo Chen, Hongdong Li: Increasing SLAM Pose Accuracy by Ground-To-Satellite Image Registration
- Zhendong Xiao, Changhao Chen, Yang Shan, Wu Wei: EffLoc: Lightweight Vision Transformer for Efficient 6-DOF Camera Relocalization
- Apan Dastider, Hao Fang, Mingjie Lin: RETRO: Reactive Trajectory Optimization for Real-Time Robot Motion Planning in Dynamic Environments
- Chuchu Chen, Yuxiang Peng, Guoquan Huang: Fast and Consistent Covariance Recovery for Sliding-Window Optimization-Based VINS
- Peter Mitrano, Dmitry Berenson: The Grasp Loop Signature: A Topological Representation for Manipulation Planning with Ropes and Cables
- Christopher König, Miks Ozols, Anastasiia Makarova, Efe Balta, Andreas Krause, Alisa Rupenyan: Safe Risk-Averse Bayesian Optimization for Controller Tuning
- Maged Iskandar, Christian Ott, Alin Albu-Schäffer, Bruno Siciliano, Alexander Dietrich: Hybrid Force-Impedance Control for Fast End-Effector Motions
- Yeping Wang, Carter Sifferman, Michael Gleicher: IKLink: End-Effector Trajectory Tracking with Minimal Reconfigurations
- Zheng Shen, Matteo Saveriano, Fares Abu-Dakka, Sami Haddadin: Safe Execution of Learned Orientation Skills with Conic Control Barrier Functions
- Connor Yako, Jerome Nowak, Shenli Yuan, Kenneth Salisbury: Vertical Vibratory Transport of Grasped Parts Using Impacts
- Yifu Wang, Yonhon Ng, Inkyu Sa, Alvaro Joaquin Parra Bustos, Cristian Rodriguez, Tao Jun Lin, Hongdong Li: MAVIS: Multi-Camera Augmented Visual-Inertial SLAM Using SE2(3) Based Exact IMU Pre-Integration
- Weihan Wang, Chieh Chou, Ganesh Sevagamoorthy, Kevin Chen, Zheng Chen, Ziyue Feng, Youjie Xia, Feiyang Cai, Yi Xu, Philippos Mordohai: Stereo-NEC: Enhancing Stereo Visual-Inertial SLAM Initialization with Normal Epipolar Constraints
- Jee-Eun Lee, Andrew Bylard, Zhouwen Sun, Luis Sentis: On the Performance of Jerk-Constrained Time-Optimal Trajectory Planning for Industrial Manipulators
- Saimouli Katragadda, Woosik Lee, Yuxiang Peng, Patrick Geneva, Chuchu Chen, Chao Guo, Mingyang Li, Guoquan Huang: NeRF-VINS: A Real-Time Neural Radiance Field Map-Based Visual-Inertial Navigation System
- Ramkumar Natarajan, Hanlan Yang, Qintong Xie, Yash Oza, Manash Pratim Das, Fahad Islam, Muhammad Suhail Saleem, Howie Choset, Maxim Likhachev: Preprocessing-Based Kinodynamic Motion Planning Framework for Intercepting Projectiles Using a Robot Manipulator
- Armand Jordana, Sebastien Kleff, Justin Carpentier, Nicolas Mansard, Ludovic Righetti: Force Feedback Model-Predictive Control Via Online Estimation
- Seo Wook Han, Maged Iskandar, Jinoh Lee, Min Jun Kim: Online Multi-Contact Feedback Model Predictive Control for Interactive Robotic Tasks
- Zhiquan Zhang, Tianyu Li, Nadia Figueroa: Constrained Passive Interaction Control: Leveraging Passivity and Safety for Robot Manipulators
- Ling Tang, Yan-Bin Jia, Yuechuan Xue: Robotic Manipulation of Hand Tools: The Case of Screwdriving
- Billy Zhong, Bin Li, Wei Chen, Yunhui Liu: Robot-Camera Calibration in Tightly Constrained Environment Using Interactive Perception
- Takamasa Kawahara, Toshiaki Tsuji: Development of an Easy-To-Cut Six-Axis Force Sensor