Read on

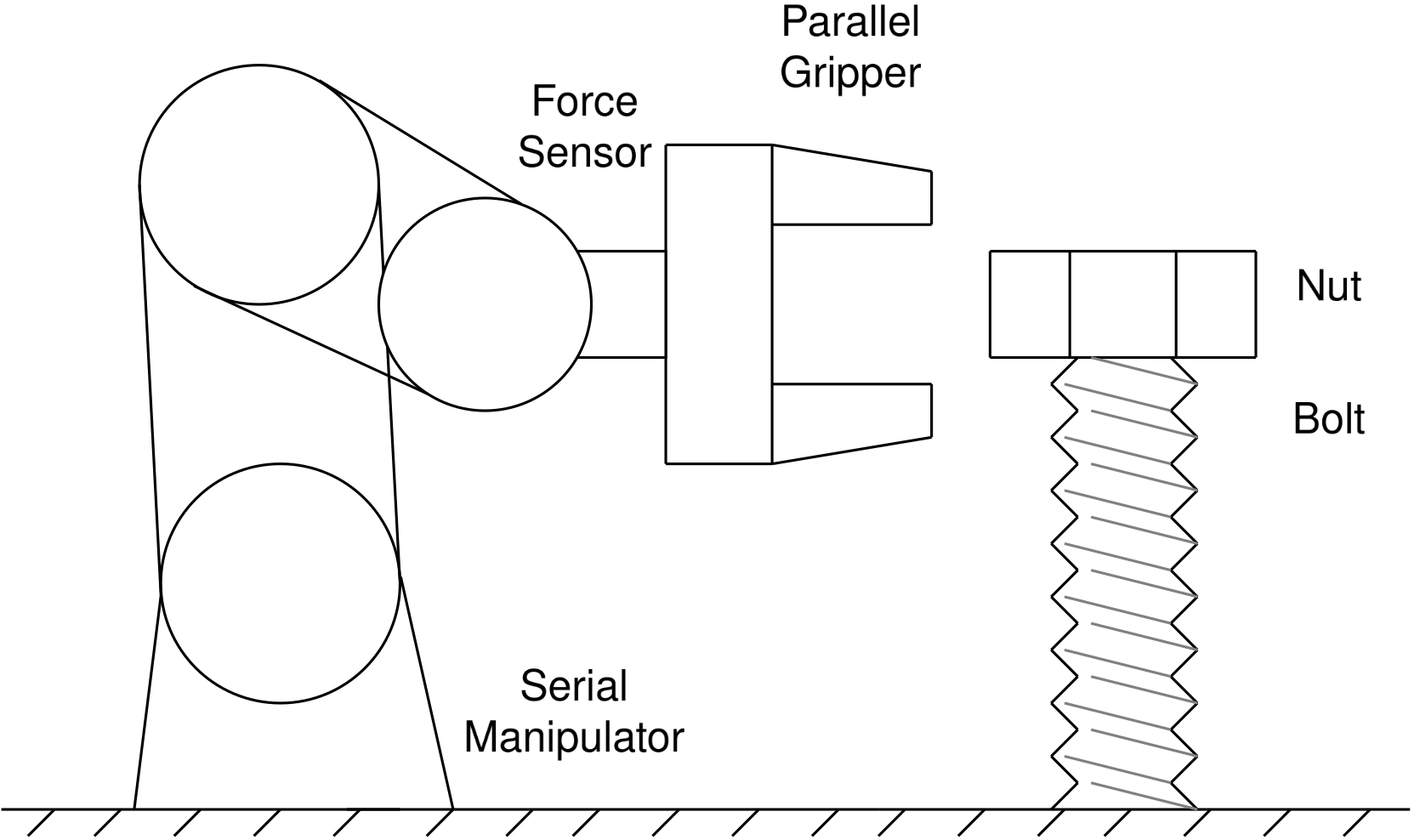
An autonomous robotic nut tightening system for a serial manipulator equipped with a parallel gripper is proposed. A control-switching scheme that alternates between force and position control allows to complete the task faster and while transmitting lower contact forces to a manipuland.
@inproceedings{kovalenko2025hybridc, title={Hybrid Control for Robotic Nut Tightening Task}, author={Kovalenko, Dmitri}, booktitle={The 13th International Conference on Control, Mechatronics and Automation (ICCMA 2025)}, pages={1--6}, year={2025}, organization={IEEE} }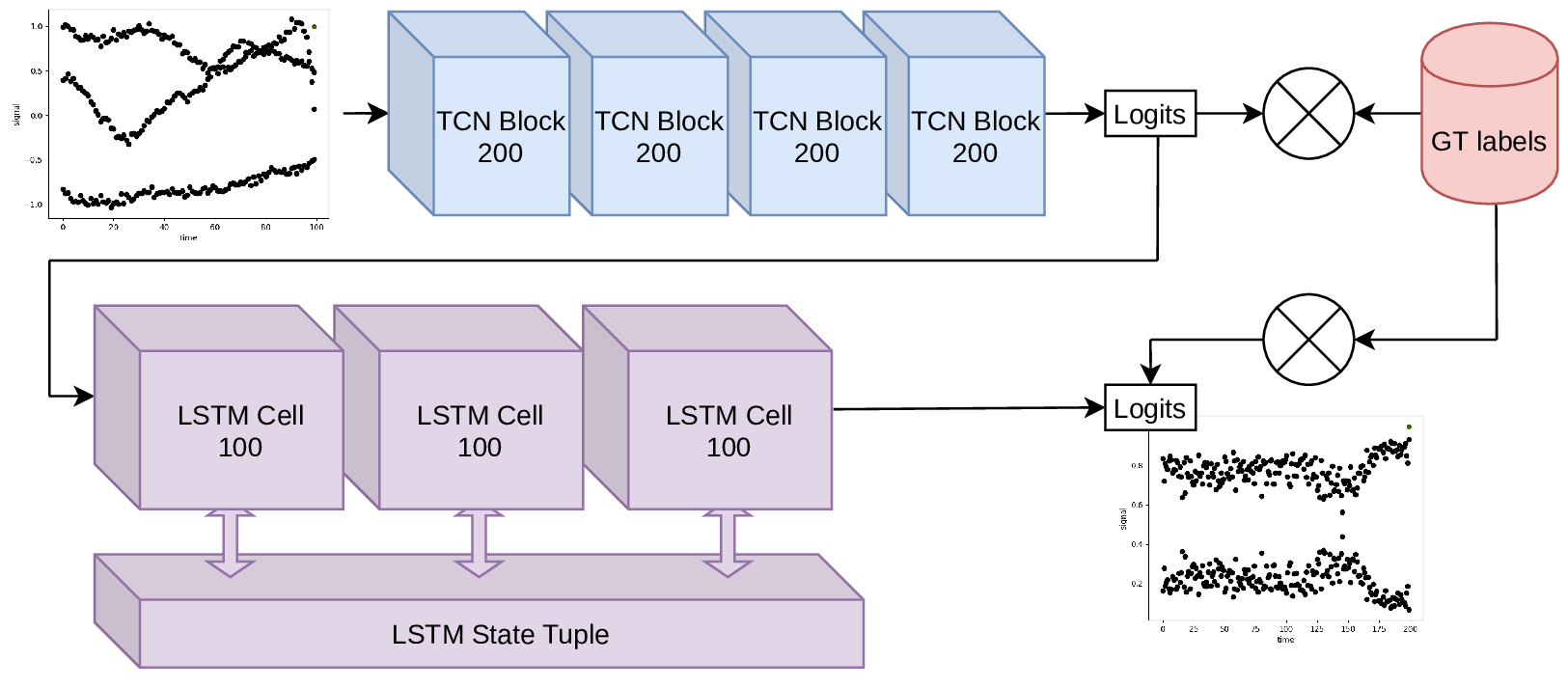
Computer vision-based navigation for virtual reality applications is always at risk of a tracking failure. An extension for a navigation system is proposed, which recognizes agents motion and stillness states from accelerometer data.
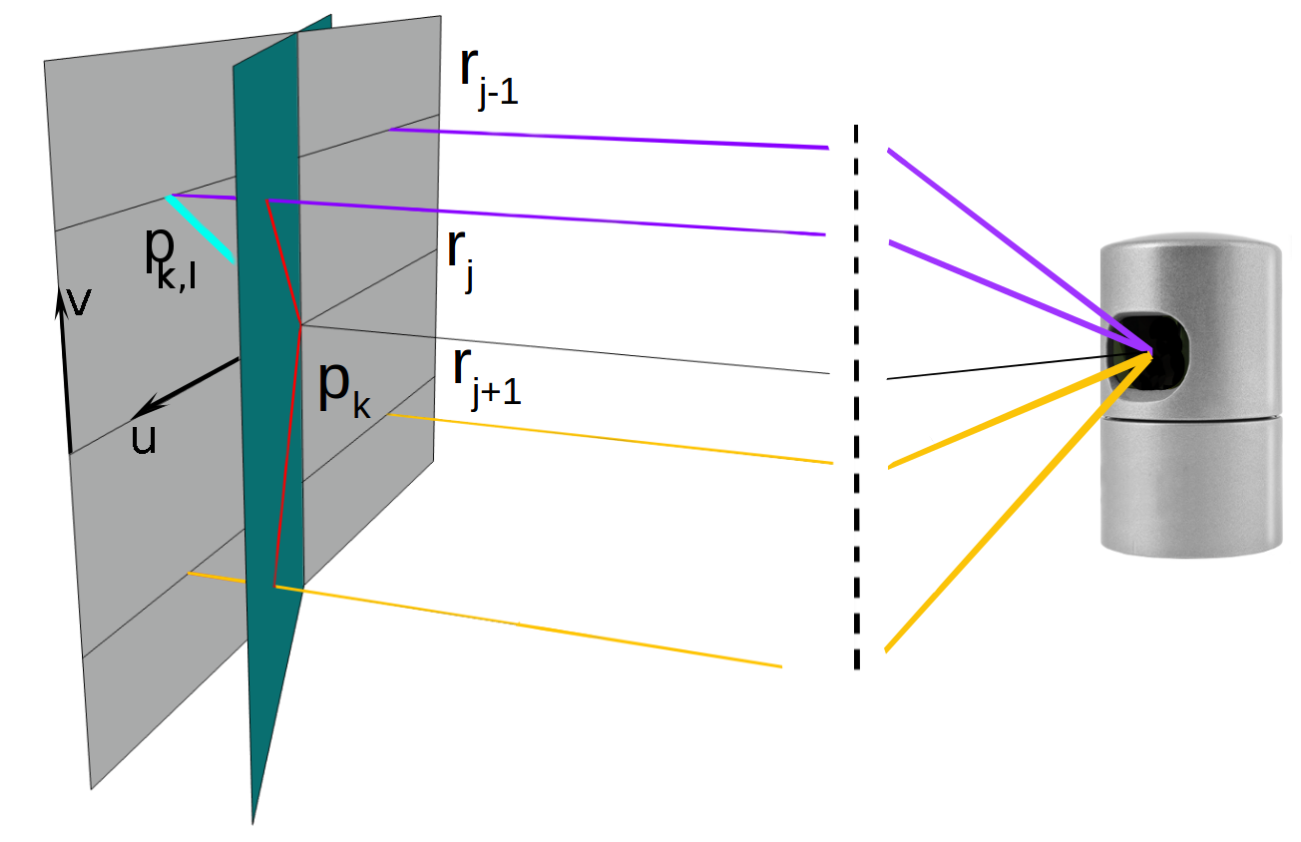
A lidar odometry method, integrating into the computation the knowledge about the physics of the sensor, is proposed. A model of measurement error enables higher precision in estimation of the point normal covariance. Adjacent laser beams are used in an outlier correspondence rejection scheme.
@inproceedings{kovalenko2019sensor, title={Sensor aware lidar odometry}, author={Kovalenko, Dmitri and Korobkin, Mikhail and Minin, Andrey}, booktitle={2019 European Conference on Mobile Robots (ECMR)}, pages={1--6}, year={2019}, organization={IEEE} }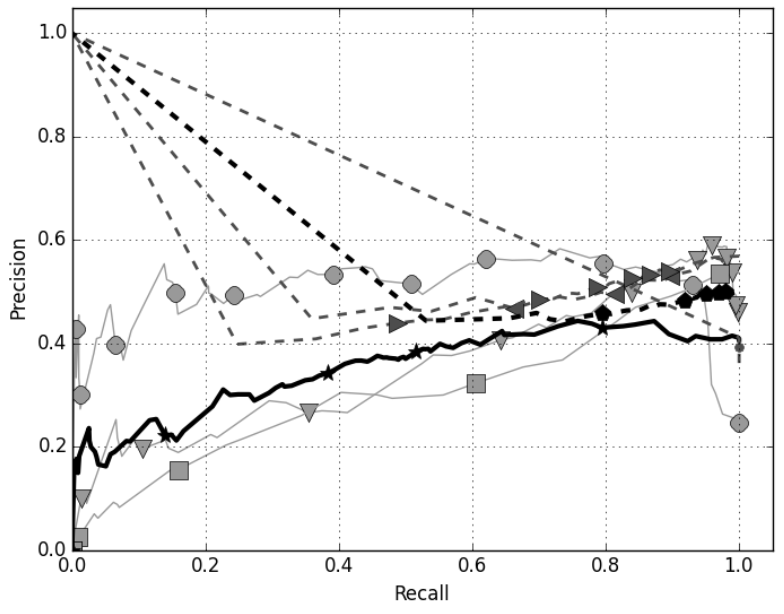
A scene association algorithm is proposed to automate the process of endoscopic surveillance. The algorithm constructs a neighborhood system for visually resemblant frames. An experimental evaluation of the algorithm has been conducted on a set of in vivo endoscopic videos.
@article{dmkov2017sceneass, title={Scene association in endoscopic videos}, author={Dmitri Kovalenko, Vitaly Gnatyk}, journal={GraphiCon Proceedings}, volume={27}, pages={269--274}, year={2017} }