Just reading through, let alone summarizing and analyzing the proceedings of the whole conference is an effort beyond the resouces of a single person, so this review is focused on just a few topics to the author's preference:
- NeRF
- Manipulation
- Miscellaneous
Some results receive no detailed comment here due to a lacking in the author's expertise in a topic or just due to the time constraints. However, these were included in the survey nonetheless just because of their awesomeness.
NeRF
NeRF-SLAM

FVLoc-NERF
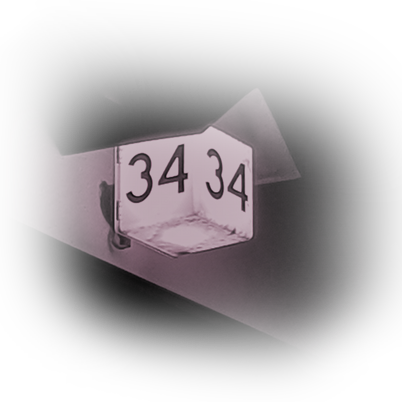
FVLoc-NERF [2] differentiates from competition in that the RGB images are the sole input for localisation, whereas iNeRF, LocNeRF require multimodal sensors to establish the initial pose. NeRF uses a photometric loss iteratively to solve an inverse problem, obtaining the pose from the view. An optimisation here is such that the inverse NeRF iterations are interdispersed with PnP iterations, where instead of the costly neural network inference the relative tranform problem is solved between couple of images.
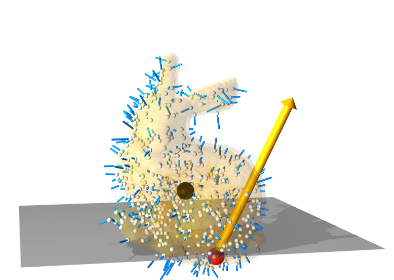
Differentiable Physics Simulation of Dynamics-Augmented Neural Objects
Manipulation
A Stable Adaptive Extended Kalman Filter for Estimating Robot Manipulators Link Velocity and Acceleration

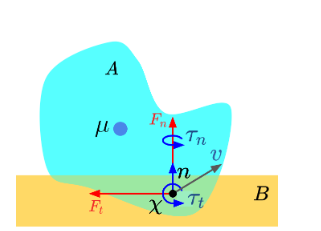
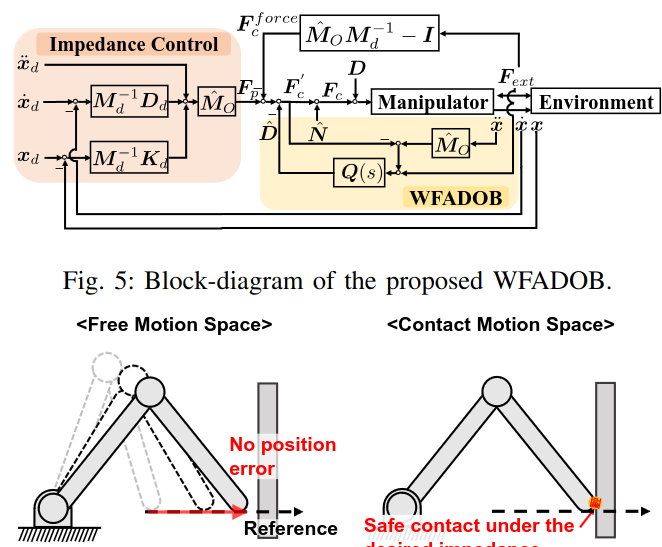
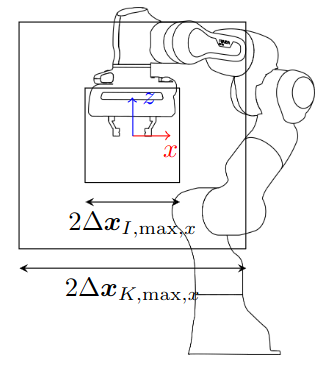
Workspace Force/Acceleration Disturbance Observer for Precise and Safe Motion Control
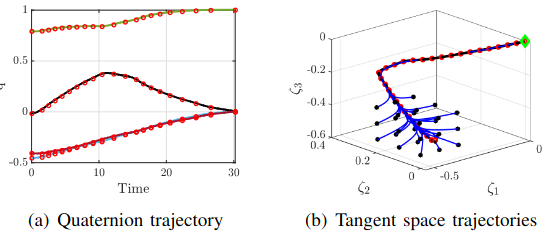
Orientation Control with Variable Stiffness Dynamical Systems
Null-Space Compliance Variation for Safe Human-Robot Collaboration in Redundant Manipulators Using Safety Control Barrier Functions

I2mpedance - a Passivity Based Integrative Impedance Controller for Precise and Compliant Manipulation and Interaction
Single-level differentiable contact simulation
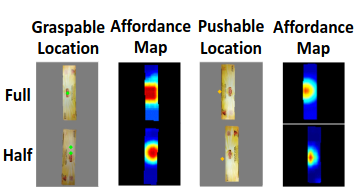
Visuo-Tactile Feedback-Based Robot Manipulation for Object Packing.
Step Toward Deploying the Torque-Controlled Robot TALOS on Industrial Operations

Miscellaneous
UMIRobot: An Open-{Software, Hardware} Low-Cost Robotic Manipulator for Education
 Robotics popularization initiative [12], consisting of a plaform, Arduino, PC software, and a set of lectures.
Robotics popularization initiative [12], consisting of a plaform, Arduino, PC software, and a set of lectures.Bi-Manual Robot Shoe Lacing
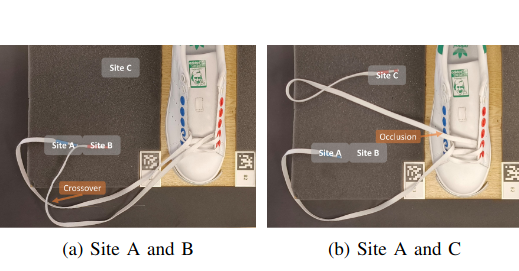 ABB Yu Mi robot succeeds [13] in lacing a sneaker. Navigation system enables eyelets tracking, different lacing patters are considered. The manipulation process goes through a set of subtasks.
ABB Yu Mi robot succeeds [13] in lacing a sneaker. Navigation system enables eyelets tracking, different lacing patters are considered. The manipulation process goes through a set of subtasks.A Unified Trajectory Generation Algorithm for Dynamic Dexterous Manipulation
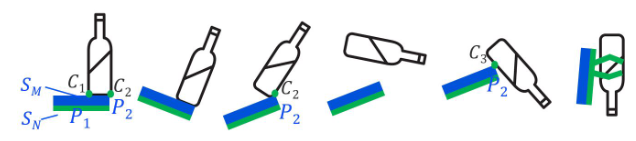 The single-arm regrasping and the dual-arm handover, both in a very dynamic manner were shown on the embodied robot [14]. The object trajectory generation is posed as an optimal control problem. The robot trajectory is solved with extra contraints in a dedicated procedure. This trajectory is tracked by the admittance controller.
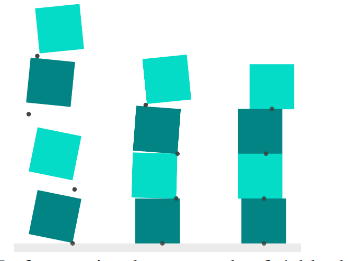
The single-arm regrasping and the dual-arm handover, both in a very dynamic manner were shown on the embodied robot [14]. The object trajectory generation is posed as an optimal control problem. The robot trajectory is solved with extra contraints in a dedicated procedure. This trajectory is tracked by the admittance controller.Bistable Tensegrity Robot with Jumping Repeatability Based on Rigid Plate-Shaped Compressors
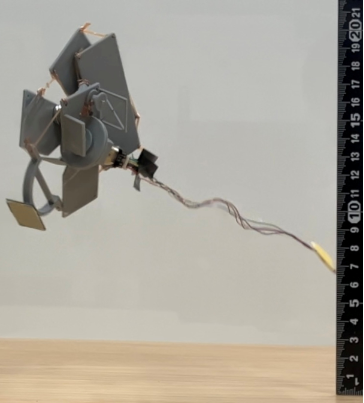 A very impressive tensegrity robot that jumps [15].
A very impressive tensegrity robot that jumps [15].Athletic Mobile Manipulator System for Robotic Wheelchair Tennis
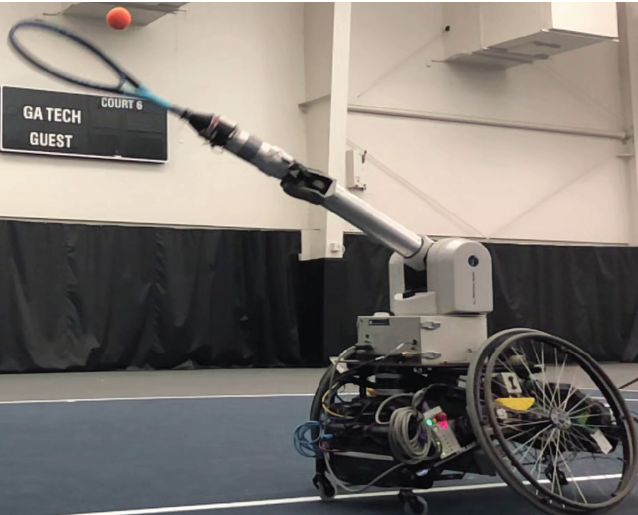 Authors [16] aspire to promote more research in human-scale robot athletics.
Authors [16] aspire to promote more research in human-scale robot athletics.EELS: Towards Autonomous Mobility in Extreme Terrain with a Versatile Snake Robot with Resilience to Exteroception Failures
 A snake robot [17] with the multi-layer motion control system, comprised of independent exteroceptive and proprioceptive feedback loops.
A snake robot [17] with the multi-layer motion control system, comprised of independent exteroceptive and proprioceptive feedback loops.Conclusion
Many ideas are left unpresented, and many works that caught author's eye were passed over due to the limited time. But, all in all, that is a one way to capture what were happening on IROS this year. Author aspires to make it in person to the future editions of IROS. So, I will see you then.
The figures in this report are courtesy of the corresponding researchers.
References
- Rosinol, A., Leonard, J.J. and Carlone, L., 2022. Nerf-slam: Real-time dense monocular slam with neural radiance fields. arXiv preprint arXiv:2210.13641.
- G. Wenzhi, B. Haiyang, M. Yuanqu, L. Jia and C. Lijun, FVLoc-NeRF : Fast Vision-Only Localization within Neural Radiation Field, IROS
- Le Cleac'h, S., Yu, H.X., Guo, M., Howell, T., Gao, R., Wu, J., Manchester, Z. and Schwager, M., 2023. Differentiable physics simulation of dynamics-augmented neural objects. IEEE Robotics and Automation Letters, 8(5), pp.2780-2787.
- Birjandi S., Khurana H., Billard A. G., Haddadin S., 2023. A Stable Adaptive Extended Kalman Filter for Estimating Robot Manipulators Link Velocity and Acceleration, IROS
- Han W., Yun W., Oh S., 2023. Workspace Force/Acceleration Disturbance Observer for Precise and Safe Motion Control, IROS
- Michel, Y., Saveriano, M., Abu-Dakka, F.J. and Lee, D., 2023. Orientation Control with Variable Stiffness Dynamical Systems. arXiv preprint arXiv:2309.15624.
- Ducaju, J., Olofsson B., Robertsson A., Johansson R., 2023. Null-Space Compliance Variation for Safe Human-Robot Collaboration in Redundant Manipulators Using Safety Control Barrier Functions, IROS
- Voigt F., Naceri A., Haddadin S., 2023. I2mpedance - a Passivity Based Integrative Impedance Controller for Precise and Compliant Manipulation and Interaction, IROS
- Le Cleac'h, S., Schwager, M., Manchester, Z., Sindhwani, V., Florence, P. and Singh, S., 2023. Single-level differentiable contact simulation. IEEE Robotics and Automation Letters.
- Liang, W., Fang, F., Acar, C., Toh, W.Q., Sun, Y., Xu, Q. and Wu, Y., 2023. Visuo-Tactile Feedback-Based Robot Manipulation for Object Packing. IEEE Robotics and Automation Letters, 8(2), pp.1151-1158.
- Perrot, C. and Stasse, O., 2023, October. Step Toward Deploying the Torque-Controlled Robot TALOS on Industrial Operations. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 10405-10411). IEEE.
- Marinho, M.M., Lin, H.C. and Zhao, J., 2023. UMIRobot: An Open-{Software, Hardware} Low-Cost Robotic Manipulator for Education. arXiv preprint arXiv:2301.06668.
- Luo, H., Demiris Y., 2023. Bi-Manual Robot Shoe Lacing, IROS
- Zhou, C., Gao, W., Lu, W., Long, Y., Yang, S., Zhao, L., Huang, B. and Zheng, Y., 2023. A Unified Trajectory Generation Algorithm for Dynamic Dexterous Manipulation, IROS
- Shimura K., Iwamoto N., and Umedachi T., 2023. Bistable Tensegrity Robot with Jumping Repeatability Based on Rigid Plate-Shaped Compressors, IROS
- Zaidi, Z., Martin, D., Belles, N., Zakharov, V., Krishna, A., Lee, K.M., Wagstaff, P., Naik, S., Sklar, M., Choi, S. and Kakehi, Y., 2023. Athletic mobile manipulator system for robotic wheelchair tennis. IEEE Robotics and Automation Letters, 8(4), pp.2245-2252.
- {Thakker, R., Paton, M., Strub, M. P., Swan, M., Daddi, G. et al., 2023. EELS: Towards Autonomous Mobility in Extreme Terrain with a Versatile Snake Robot with Resilience to Exteroception Failures